
Чтобы принять решение о распределении тяги, компьютер сравнивает скорость и направление движения, указанные водителем, с реальной траекторией движения. О желаниях водителя системе сообщают датчик угла поворота рулевого колеса и датчик положения педали газа. Информация о реальной траектории движения поступает с датчиков скорости вращения колес и датчика угловых ускорений.
Первые электронные блоки управления двигателем (ECU), появившиеся в 1980-х годах, принимали аналоговый сигнал датчика положения дроссельной заслонки и находили соответствующие выходные данные в таблице, заранее записанной в память. Датчик тогда представлял собой обычный потенциометр, или переменный резистор. Дроссельная заслонка соединялась с контактным ползунком, который перемещался по проводящей дорожке с определенным сопротивлением. От длины дорожки между ползунком и вторым контактом зависело сопротивление резистора, в соответствии с которым ECU определял параметры работы двигателя.
Очевидный недостаток переменного резистора – контактный принцип работы и, соответственно, трение. Со временем проводящая дорожка и ползунок истирались, и датчик приходил в негодность. Полностью цифровые ECU, обрабатывающие множество входных параметров в реальном времени, без помощи заранее записанных в память таблиц, потребовали принципиально иной точности инадежности измерений. Пришло время магнитных датчиков.
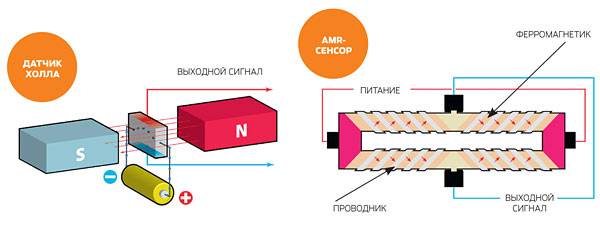
Датчик Холла основан на принципе, который в упрощенном виде можно описать так. Представим себе, что через металлический брус, помещенный в магнитное поле, течет электрический ток (это напряжение питания датчика). Магнитное поле отклоняет электроны от линии движения вдоль электрического поля к одной из граней бруса. В результате на боковых гранях появляется напряжение, величина которого зависит от силы магнитного поля. Если закрепить на валу дроссельной заслонки постоянный магнит, значение напряжения на чувствительном элементе датчика Холла будет точно определять ее текущее положение.
В 1856 году Уильям Томпсон обнаружил, что электрическое сопротивление материалов может изменяться в магнитном поле. Анизотропное магнетосопротивление предполагает, что сопротивление меняется в зависимости от направления магнитного поля. На этом принципе основана работа самых современных угловых датчиков – AMR-сенсоров.
Сопротивление в опытах Томпсона менялось едва заметно. В современных сенсорах применяются ферромагнитные проводники. Их магнитные свойства также меняются в зависимости от направления внешнего поля, что усиливает эффект. Помогают и технологические ухищрения: тонкую пленку ферромагнетика (10–50 нм) покрывают сетью тончайших полосок проводников, чтобы придать электрическому полю внутри чувствительного элемента нужное направление. Четыре чувствительных элемента в одном датчике объединяются в мост и работают сообща, и все равно их общее сопротивление между положениями «ноль» и «газ в пол» изменяется всего на 3–4%.
Тем не менее этого AMR-сенсорам хватает, чтобы превзойти датчики Холла и по чувствительности, и по разрешению, и по точности. Эти бесконтактные сенсоры чрезвычайно надежны и достаточно дешевы при массовом производстве. Они идеально подходят на роль датчиков поворота руля и положения педали газа.
Чтобы узнать, как ведет себя автомобиль на самом деле, компьютер считывает показания датчиков скорости вращения колес (они же датчики ABS) и датчика угловой скорости. Датчики ABS представляют собой простейшие датчики Холла. На каждую полуось устанавливается зубчатое колесо. Когда зубец проходит мимо датчика, последний реагирует на небольшое изменение магнитного поля и посылает в компьютер импульс. По частоте таких импульсов система точно определяет скорость вращения каждого колеса, мгновенно фиксируя пробуксовку и блокировку.
Датчик угловой скорости представляет собой вибрационный гироскоп. Его активный элемент напоминает два камертона с общей рукояткой. Он сделан из кристаллического кварца, поэтому, когда на одну пару зубцов подается напряжение, элемент вибрирует с заданной частотой. Когда «камертоны» поворачиваются вместе савтомобилем, на них начинает действовать сила Кориолиса, изгибающая зубцы. Благодаря пьезоэлектрическому эффекту на второй паре зубцов возникает напряжение, величина которого зависит от скорости вращения автомобиля.
Желаемая траектория
Угловые датчики, основанные на эффекте Холла или магнетосопротивлении, дают компьютеру информацию о положении педали газа и рулевого колеса.
Действительная траектория
Датчики угловой скорости И ABS дают информацию о реальной траектории движения автомобиля, а также о пробуксовке или блокировке колес.