12 ноября 2011, 12:55
Фирменный двигатель Ауди Фольксваген 1,4 TSI Twincharger
Скорость ни разу никого не убила, внезапная остановка… вот что убивает
Джереми Кларксон
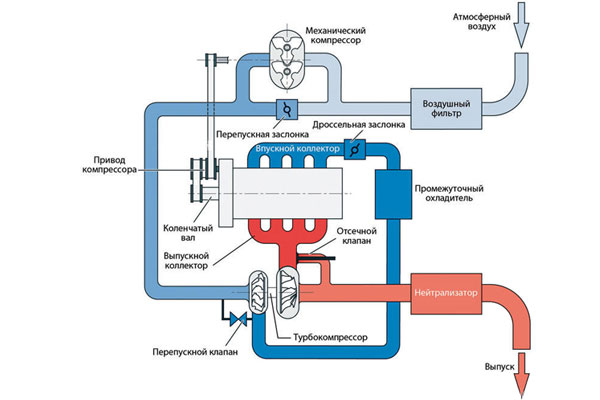
Очень необычную вариацию на тему последовательного турбонаддува предложили инженеры фирмы «Фольксваген». В двигателях семейства TSI приводной нагнетатель и турбокомпрессор работают совместно. Пока обороты невелики, воздух подает нагнетатель, а турбина раскручивается вхолостую, без нагрузки. По мере роста оборотов агрегат потребляет все больше мощности на привод, а это расточительно. Поэтому после 2400 об/мин открывается перепускная заслонка, подающая воздух в обход нагнетателя. Электромагнитная муфта в его приводе отключает устройство. Одновременно закрывается перепускной клапан турбокомпрессора, и турбокомпрессор, успевший набрать скорость на холостом ходу, включается в работу. Результат: с 1,4-литрового мотора снимают 170 л.с., а момент больше 200 Н.м двигатель выдает уже при 1250 об/мин.
Конструкторы Audi и Volkswagen без устали продолжают поиск новых решений. Поскольку температура отработавших газов современных двигателей порой превышает 1300°С, появляются роторы из высокопрочной керамики, термостойкой и легкой.
В ближайшие годы системы турбонаддува наверняка усовершенствуют. Механические нагнетатели, родившиеся почти 100 лет назад, не сдают позиций. Ведь современные технологии позволяют делать «классические» компрессоры с точностью часовых механизмов. Резервы турбонаддува и подавно не исчерпаны. Так что «надувательство» будет продолжаться, пока жив сам двигатель внутреннего сгорания.
11 ноября 2011, 13:00
Турбокомпрессоры с изменяемой геометрией VTG
Турбокомпрессоры с изменяемой геометрией VTG (Variable Geometry Turbine)
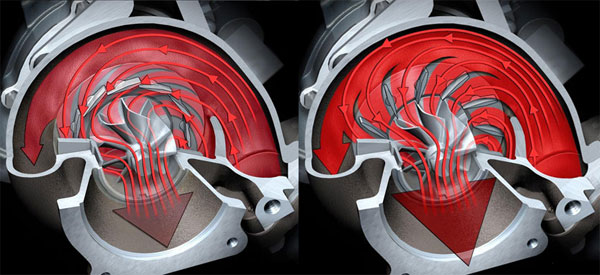
Первым VNT (Variable Nozzle Turbine) турбокомпрессором с изменяемой геометрией в 1995 году стал турбокомпрессор для Фольксвагена Multivane с 1,9 литровым двигателем TDI. Принцип действия VNT турбокомпрессора заключается в оптимизации потока выхлопных газов, направляемых на крыльчатку турбины. На низких оборотах двигателя и малом количестве выхлопных газов VNT турбокомпрессор направляет весь поток выхлопных газов на колесо турбины, тем самым увеличивая ее мощность и давление наддува (на рисунке слева). При высоких оборотах и высоком уровне газового потока турбокомпрессор VNT располагает подвижные лопатки в открытом положении, увеличивая площадь сечения и отводя часть выхлопных газов от крыльчатки, защищая себя от превышения оборотов и поддерживая давление наддува на необходимом двигателю уровне, исключая перенаддув (на рисунке справа).
Двигатель с системой VNT, имеет лучший отклик, производит большую мощность и крутящий момент, потребляет меньше топлива и обеспечивает снижение вредных выбросов по сравнению с двигателем, связанным с турбокомпрессором традиционным байпасом. Благодаря короткому времени отклика и плавному ускорению улучшается управляемость машиной и срок ее службы. По сравнению с турбокомпрессором, оборудованным байпасом, турбокомпрессор VNT, более эффективный в более широком диапазоне величин потока, имеет следующие 3 основных преимущества:
- Более высокая мощность: при определенной скорости двигателя и для заданного давления наддува модели VNT обеспечивают большую разность давлений и снижают температуру газов на выходе из двигателя
- Больший крутящий момент: при низких оборотах двигателя модели VNT обеспечивают повышенное давление наддува
- Экономия топлива и снижение выброса вредных веществ в атмосферу: контролируемые непосредственно системой управления двигателем, турбокомпрессоры VNT оптимизируют сгорание
Основной проблемой VNT турбокомпрессора является недостаточная устойчивость конструкции к высоким температурам. По этой причине основным местом применения технологии VNT стали дизельные двигатели. Первой «ласточкой» в применении турбины с изменяемой геометрией на бензиновых двигателях стала компания Porsche с ее новой моделью 911 Turbo.
Рекомендуем вам ознакомиться с заблуждениями про турбонаддув: Мифы турбонаддува
07 ноября 2011, 15:48
Лазерные фары
Передние фары автомобилей будущего превратятся в массивы лазеров.

Сегодня светодиоды понемногу вытесняют своих предшественников из автомобилей. Они используются в салоне, в поворотных и стоп-сигналах, в фонарях заднего хода, наконец, в передних фарах. Впрочем, в фарах они могут продержаться недолго: разработчики BMW трудятся над созданием передних огней на основе лазера. По их уверениям, такая технология: во-первых, намного более энергоэффективна; во-вторых, открывает новые пространства для дизайна; в-третьих, позволяет реализовать дополнительные решения, повышающие безопасность… словом, доводов достаточно.
Некоторые читатели, одаренные богатым воображением, могут представить себе стильный BMW, мчащийся по трассе и лазерами испепеляющий препятствия впереди… По счастью, все далеко не столь грозно. Непосредственно лазерный луч и не будет попадать на дорогу: он должен насыщать энергией флуоресцентный фосфорсодержащий материал внутри фары, который будет испускать белый свет, оптимальный для использования в условиях дорожного движения, достаточно яркий, но совершенно безопасный и для препятствий, и для других водителей и пешеходов. При том что энергопотребление фары будет более чем вдвое ниже, чем у обычной на светодиодах, яркость ее будет не меньшей.
Каждый светящийся элемент будет в сотни раз более миниатюрным, нежели светодиодная ячейка, что открывает совершенно новые возможности для их интеграции в автомобиль. Кто знает, что придет в голову дизайнерам? Может, вдесятеро меньшие фары, или превращение их в единую узкую полосу вдоль капота?.. Тем более что использование новых фар позволит использовать все современные технологии, связанные с этой важной деталью автомобиля – такое, как вращение для адаптивной подсветки во время поворотов, антиослепляющие и другие решения.

Разработчики BMW обещают, что мы увидим новинку в деле уже через пару лет – на серийных автомобилях, созданных на базе концепта BMW i8. Их производство намечено начать в 2013 г., так что ждать осталось, в самом деле, недолго.
Автомобильные новости про: светодиоды, лазер, энергопотребление фары, адаптивную подсветку.